
iPhoneに少し前から搭載され始めたLiDAR。今後は自動運転の分野で必須と言われるデバイスです。本記事では、具体的にどういった技術で実現されているのか、徹底解説していきたいと思います。
LiDARとは
LiDARとは、「Light Detection and Ranging」や、「Laser Imaging Detection and Ranging」の頭文字をとったもので、レーザーを使った距離センサです。
簡単な原理は次のようなイメージで、下図「4」のレーザから発行された光が物体に反射し、その反射光を下図「3」の受光素子で検知し、「発光」と「受光」の時間差から、「距離」を検知する。
というのが、基本的なLiDARの考え方となります。
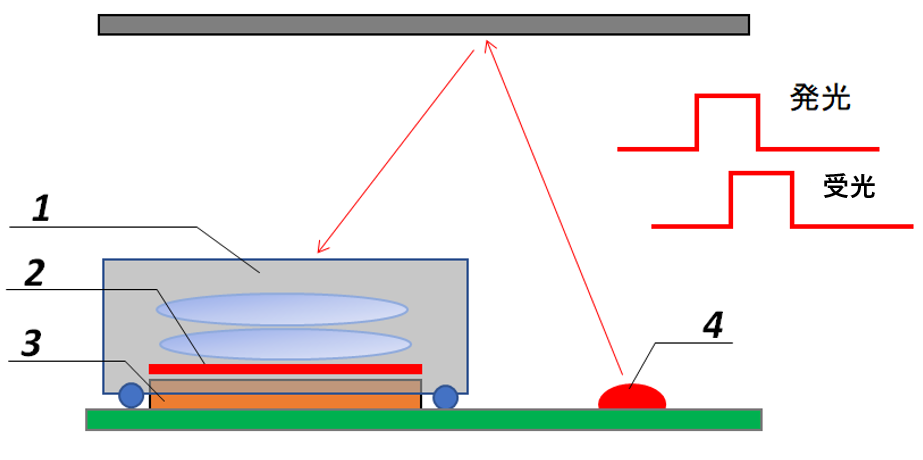
※1.レンズ、2.バンドパスフィルター、3.受光素子、4レーザー
iPhoneのLiDARスキャナに関する解説は下記で以前実施しておりますので、よろしければご参照お願いいたします。
参考:iPhone13Proの技術仕様をわかりやすく解説。LiDARスキャナ編
また、ToFセンサに関する記事も下記ありますので、こちらも参考にしていただけると幸いです。
参考:ソニーも狙っている、次世代センサ、ToF(Time of Flight )センサの原理説明
本記事では上記の記事以上に網羅的に解説していきたいと思います。
LiDARに使われている技術
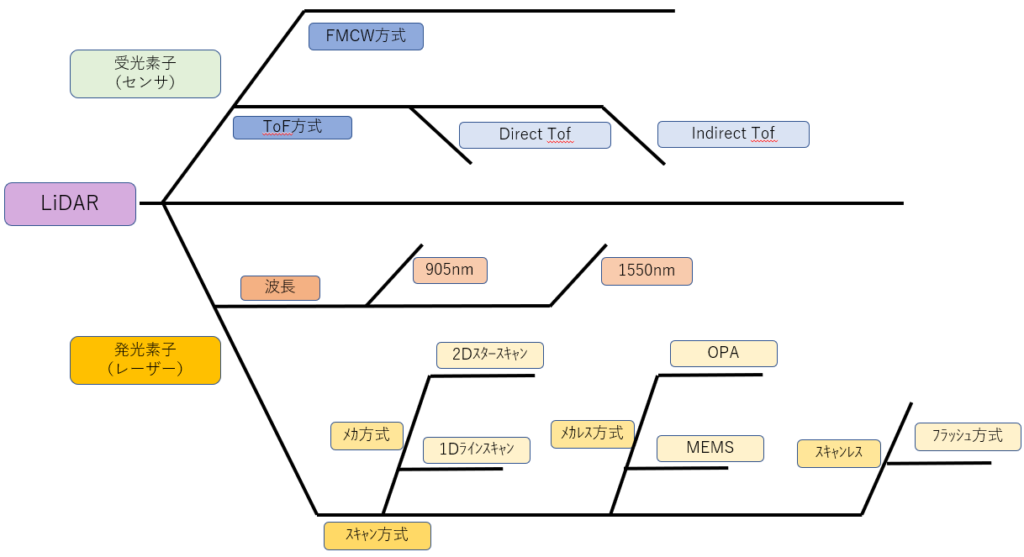
LiDARに使われている技術をまとめると、次のようになります。
まず、大きく「発光素子(レーザ)」「受光素子(センサ)」に分けられ、
測距方式は、「FMCW方式」「ToF方式」に分けられます
発光素子側は、スキャン方式として「メカ方式」「メカレス方式」「スキャンレス方式」があり、
波長も、「905nm」「1550nm」に分類されています。
それぞれ詳しく説明していきます。
受光素子(センサ)
受光素子側は、発光素子から発光されたレーザの反射波を測定しますが、その方式には「ToF方式」「FMCW方式」があります。
ToF方式
ToFは「Time of Flight」の略で、光の飛行時間から距離を取得する方式で、この方式には、「dToF」と言われる、ダイレクトToF方式と、「iToF」と言われる、インダイレクトToF方式の2種があります。
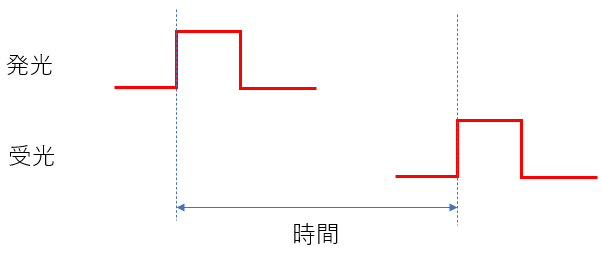
dToF
ダイレクトToF方式で、文字通り、光の反射時間を直接計測する方式です。イメージはこの図の通りで、自動運転にはこの方式が使われている場合が多いです。発光した時間とそれが物体に反射し受光した時間の時間差から距離を計算します。
iToF
インダイレクトToF方式で、dToFではレーザパルスを送信していたのに対し、iToFでは周期的なレーザ光を放出します。対象物の距離に応じ、位相がズレた波形が戻ってくるため、その位相から距離を計算する方式です。

FMCW方式
従来車載のミリ波で行われていた方式で、レーザーの周波数を連続的に変調させ、返ってきたレーザー光の周波数のずれから距離を測定する方式です。iToFと似ていますが、レーザーの周波数を変調させる所に大きな違いがあります。
発光素子(レーザー)
波長
LiDARで用いられる波長は主に、905nmと1550nmが用いられます。どちらも近赤外の領域になる為、目には見えません。
905nm
この波長は、大気中にごくわずかしか存在しない為。太陽の光がLiDARに影響を与えにくいように選ばれています。また、発光効率がよく安価である。という理由もあります。
本波長の場合、目に影響を及ぼさないように、クラス1(JIS C 6802/EN 60825-1)に制限されています。
1550nm
1400nm以上の波長は網膜に吸収されず、規制の対象外となる為、より強い光が発行でき、測定距離を延ばせる。という利点があります。
スキャン方式
メカ方式
自動運転車の天井についてくるくる回っているLiDARを見た事があるかもしれませんが、そのようにメカニカルな機構がついている物をメカ方式と呼びます。動き方には大きく分けて2種の方式があります。
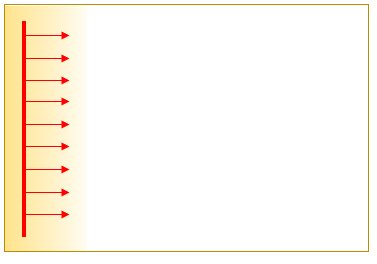
・1Dラインスキャン
下図のようにレーザーを垂直に並べ、そのラインを水平方向へ移動する方式。
・2Dライタースキャン
下図のように、水平方向1ラインずつスキャンした後、垂直方向へ移動。これを繰り返しスキャン方式。
上記はどちらも、LiDARのデバイスの中にミラーなど、レーザーの光を反射できる物を搭載し、そのミラーの角度をモータなどで動かし変更する事で、レーザの光を上のように放射させます。その反射光を受光素子で撮像する事で、前方や周辺の障害物を検知する仕組みです。
メカレス方式(MEMS、OPA)
駆動部にメカニカルな機構を使わず、メカ機構を半導体や光学技術に置き換えてスキャンを実施する方式です。レーザー光を半導体に当て、半導体の特性を利用し、レーザーの反射角度を変更する方法であり、これらの方式を使う事で、今までのモータなどでミラーを動かすといった、非常に大きく、コストがかかっていた部分を削減する効果があります。今後の主流になっていくのではないかと予想します。
・MEMS
Micro Electro Mechanical Systemsの略称で、半導体上に形成されたミラーを制御することで、スキャンを実現します。つまり半導体面に当たった光の反射角を半導体の特性を利用して変更する方式で、メカ式のようにミラーをモータで動かさなくても、レーザーの反射角が制御できる方式です。
・OPA
Optical Phased Arrayの略称で、光が回折および干渉する原理を利用し、半導体内でレーザーの進行方向を制御します。方式が異なるだけで、出来る事はMEMSと類似しています。
スキャンレス
スキャン自体を行わない方式で、カメラのストロボのように、Flash動作で光を照射する方式です。こちらはスキャンが必要ないので、構造は楽ですが、一度に広範囲にレーザをまき散らす為、エネルギーが分散され、長距離には対応できていないという弱点があります。スマホ等、測距距離が短くても問題ない場合は良いですが、車のように数百m先まで測定するような使い方には不向きとなります。
まとめ
今後自動運転技術が加速していくにつれ、前方を走る車や、人、物を検知する為、LiDARを搭載した車が増えて来ると予想されます。現在は905nm+メカ式の物が多く、測距距離とコストが課題になってますが、1550nm+メカレス方式になると、普及率が大きくあがるのではないかと予想されます。
自動車以外にも、様々なスマホへの搭載が期待されており、ますます目が離せない状況です。


コメント