ものづくりエンジニアの必須知識である。工場でのモノづくり。ご存知ですか?今、工場は熱いです。過去の工場とはまったく違う物になりつつあります。インダストリー4.0(第四次産業革命)をドイツが提唱し、世界的に製造業におけるオートメーション化及びデータ化、コンピュータ化を目指す動きが活発になっています。
工場でのライン作業は、人が大量に並んで流れ作業で組立しているのではないの?と思われている方、今の工場ってどうなっているの?今度どうなっていくの?
そういった疑問にお答えしていきたいと思います。
本記事では、自動化の中心となり、工場のモノづくりの大改革を支える技術である、「産業用ロボット」にフォーカスし、まず、産業用ロボットとは何かを説明し、その市場規模と未来がどうなっていくのかを、分かりやすく説明していきたいと思います
産業用ロボットとは
まず初めに、産業用ロボットとは、ですが、定義があります。
「自動制御され、再プログラム可能で、多目的なマニピュレーターであり、3軸以上でプログラム可能で、1か所に固定してまたは運動機能をもって産業自動化の用途に用いられるロボット」
つまり工場の中で、モノづくりをする為に活用され、多軸でプログラム可能なロボットの事を産業用ロボットとJISでは定義されています。
それではこの定義に基づいた産業用ロボットとは、どういった種類があるのでしょうか。見ていきましょう。
- 垂直多関節ロボット
- 人間と同じようにいくつかの関節を持っているロボットであり、産業用ロボットの代表格。軸の数は一般的には5~7軸の物があり、人間の腕のように動き、モノづくり工場の中で、製品の組み立て、搬送をはじめ、自動車工場では溶接や塗装といった工程で活用されています。↓こんな感じの物です。


- スカラロボット
- こちらも工場で使われているロボットとしての代表格。水平方向の2つの回転軸と、垂直方向の1つの軸で構成されており、モノを掴み、別の場所に移動させる。という事に特化したロボットとなります。動く範囲は限られていますが、その分高速に動く事ができ、よく工場の映像で、ベルトコンベアに流れている製品を高速に選別するような場合に活用されています。↓こんな感じのロボットです。
-

- パラレルリンクロボット
- 2~4対のアームで先端を支持するタイプのロボットで、先端にワークを吸いつけてモノを移動させるためのロボットです。こちらもスカラと同様高速な動作が可能な為、ベルトコンベアの上部とかに取り付けられ、不良品の選別等を高速に実施する為に用いられます。

- 直交ロボット
- こちらは直角に組み合わせた直線軸から作られるロボットで、昔からありますが、今ではあまりメジャーではない為、説明は省略します。
- 協働ロボット
- 本ロボットは、通常であれば産業用ロボットに必要は安全柵が不要なロボットであり、人と一緒に働く事ができるロボットです。このロボットが今熱いので、後で特集したいと思います。見た目はこんな感じの物や、通常の垂直多関節ロボットと変わらない外観の物もあります。↓

そして、これらを動かす為に必要なものとして、コントローラ、ティーチングペンダント、ロボットハンド、ビジョンセンサが代表的な物として挙げられます。
- ロボットコントローラ
- ロボットを操作する為のコントローラです。パソコンのマザーボードのような制御基板と、工場電源を元にモータを駆動させるための、コンバータ基板(工場のAC200V電源をDC電源に変える基板)とインバータ基板(モータを駆動させる基板)の大きく3種の基板が入っており、その他、シーケンサ等と通信接続できるようなインターフェイスを持っております。外観イメージはこんな感じ。

- ティーチングペンダント
- ロボットを操作する為の操作機です。この操作機で、ロボットを動かしたり、または、ロボットは工場の中では一定の動きをさせる必要がありますので、そのプログラムをする為にも、このティーチングペンダントは活用されます。

- ロボットを操作する為の操作機です。この操作機で、ロボットを動かしたり、または、ロボットは工場の中では一定の動きをさせる必要がありますので、そのプログラムをする為にも、このティーチングペンダントは活用されます。
- ロボットハンド
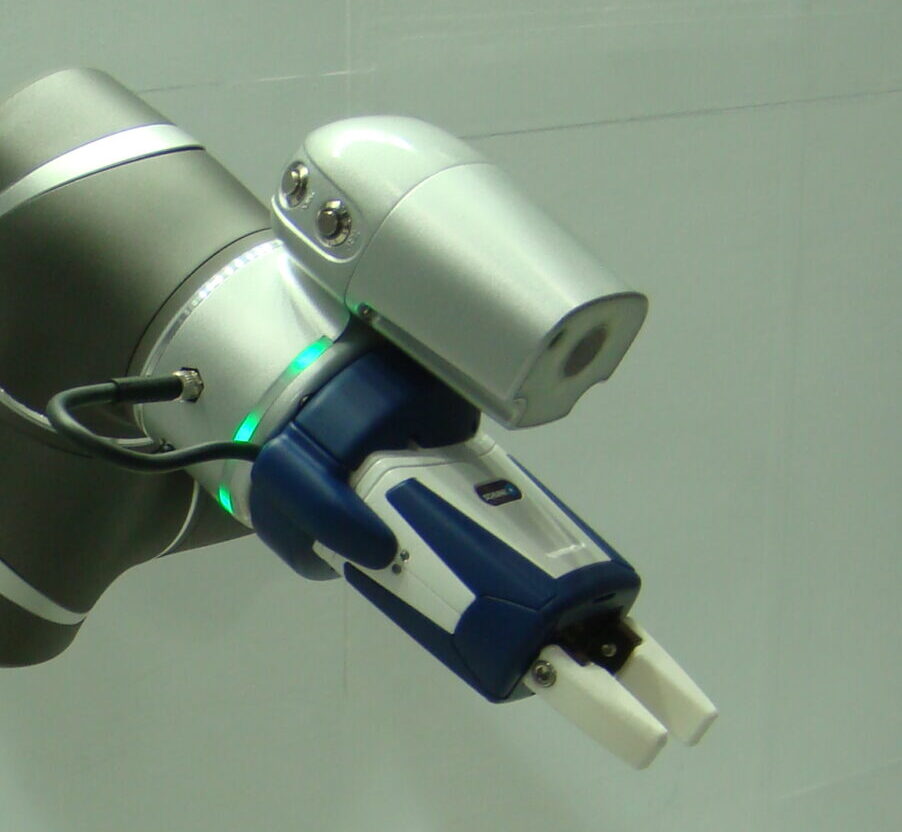
- 産業用ロボットは工場で活用され、製品を運んだり組み立てたりする為に用いられます。つまり関節だけ動いても、実際の製品を掴めなければ意味がありません。製品はモノによって違いますので、生産する製品に合わせてロボットの先端の、吸着や把持する部分を変えなければいけません。その部分の事をロボットハンドと言います。下の図の先端部分です。この白い部分で製品を挟んで運ぶ為に用いられます。
- 産業用ロボットは工場で活用され、製品を運んだり組み立てたりする為に用いられます。つまり関節だけ動いても、実際の製品を掴めなければ意味がありません。製品はモノによって違いますので、生産する製品に合わせてロボットの先端の、吸着や把持する部分を変えなければいけません。その部分の事をロボットハンドと言います。下の図の先端部分です。この白い部分で製品を挟んで運ぶ為に用いられます。
- ビジョンセンサ
- 最近はすごくメジャーな製品になってきました。例えば、ラインに流れて来る、野菜、果物をビジョンセンサで見て、AIをつかって仕分けをする。なんてのは非常に有名ですね。上の図のハンドの上についていつ物がビジョンセンサです。
どうでしょうか。これらが、産業用ロボットと言われている物一式です。
これらのロボットは今までは、工場の中で、ただひたすらに一定の単調作業を人の代わりに実施する。24時間休みなく動き続ける。
これが特徴でした。しかしながら近年のAIと協働型ロボットの進化により、
「人と一緒に、考えながら作業が可能」
になってきています。これにより、今まで人ではできなかった巧の技が必要な作業、野菜の仕分けのような熟練者の経験が必要な作業。こういった作業をすべてロボットに置き換えられる時代が来ているのです。
そして、例えば皆様が持っているスマホですが、一昔前は中国の工場で、大量に人を雇いの組み立てをする。でしたが、これらの人はロボットに置き換わってきています。
今まで賃金が安いという理由でアジア諸国に電化製品の工場をアジアに立てていましたが、これらの工場がみるみるオートメーション化しており、もう昔の姿からガラッと変わってきています。
次の時代の生産方法。インダストリー4.0(第四次産業革命)がすでに来ています。
次のトピックでは、これらの説明に現実味が出るように、データで、産業用ロボットの市場規模を説明していきたいと思います。
産業用ロボットの市場規模
まずこのデータから。2013年と2020年で比較した時に、各工場の工程でロボットの導入が何%増えているのか?(各工程で使われるロボットの売上がどの位増えているのか)を見ていきます。
ちょっとピンとこないかもしれませんが、製品の組み立てラインでは、2013年に対し、2020年で約200%ロボットが導入されている。つまり、工場の中のロボットの数が倍になってる。という事を指します。
| 用途 | 2013~2020年間の伸長率 |
| 溶接・塗装 | 137% |
| アクチュエータ | 130% |
| 電気製品の組立 | 191% |
| 搬送 | 121% |
次に上の組立作業に着目し、各地域で、製品の組み立て用のロボットの導入は何%増えているのか?
アジアを見てみると243%という数字になっています。ロボットの導入数が約2.5倍。つまりロボットを販売しているメーカからしたら、この7年間で、売上が倍以上になっている。という事です。ロボットはシステム導入すると1台辺り500万から1000万が相場になります。これを考えると、売上規模は凄まじいですね。
| 地域 | 2013~2020年間の部品の組み立てに使われるロボットの地域別伸長率 |
| アジア | 243% |
| 日本 | 145% |
| 欧州 | 152% |
| 米州 | 180% |
これら導入が進んでいる背景として、各国ごとに理由は異なりますが、それぞれこんな感じの理由だと考えれらます。
| 地域 | 市場拡大理由 |
| アジア | 中国の人件費の高騰による自動化ニーズの高まり。 |
| 欧米 | 工場の自動化を目指し、特に難易度が高い作業の自動化への取り組みが活発化 (特にヨーロッパ) |
| 日本 | 労働人口の減少 モータの80W規制撤廃によるロボット需要の増加 (80W規制とは、80W以下のロボットには安全柵は必要なく、特別な教育なしでロボットが扱えるようになるという事) |
アジアは人件費の高騰により、労働者をロボットに置き換える事がすごい勢いで進んでいます。私の知っている所では、Appleではすでにこういった取り組みを実施しており、中国の組み立て工場に大量にロボットを導入していますね。
日本はそもそも労働者が減ってきているから、ロボットを導入しないと、労働者が足りない。
欧米はインダストリー4.0で、工場丸ごと自動化する為に、難しい作業もロボットにやってもらわないといけない。
こういった全世界のニーズを受けて、今、産業用ロボットの市場は「熱く」なっております。
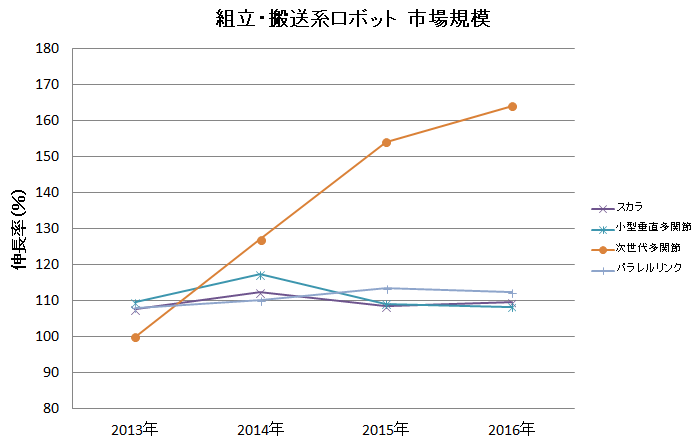
では、上のトピックで書いた、どのロボットが一番売れているのでしょうか?次のグラフをご覧ください。これは組立工程におけるロボットの導入推移を示したグラフですが、どのロボットも毎年100%を超える伸長率があるので、伸びている市場ですが、1つだけ、ずば抜けているロボットがあります。
次世代多関節と書いてありますが、これが協働ロボットです。
これだけ伸びている市場って今の世の中他の製品でありますか?というくらい爆上げしています。このロボット作ったら絶対儲かるやん。という世界です。
ただ、それが難しいですけどね。本ブログの中で、少しずつエンジニアリング観点でも書いていこうと思いますので、楽しみにしていてください。
協働ロボットとは
これまでで、産業用ロボットの市場がどれだけ活発なのかお判りいただけたと思いますので、最後に協働ロボットとは何か、簡単に概略を記載していきたいと思います。
通常の多関節ロボットと協働ロボットの違いはこんな感じです。つまり、今までのような、「ロボット」という感覚ではなく、一緒に働くパートナー(人)に近い存在です。手を持って操作する事でその作業を覚え、もし仮に作業中に人とぶつかっても安全に停止する。
ただデメリットもあり、人と同じように動きが遅かったり、精度が低かったり、ロボットに求められる、人では出来ない高速な動き、正確さは、まだまだ少し物足りなさがあり、これから進化する伸びしろは持っていると思います。
| 普通の多関節ロボット | 協働ロボット | |
| 安全柵 | 必要(ロボット買ったら柵で仕切る必要あり) | 不要(柵がいらないので、人が隣で作業可能) |
| スピード | 早い(当たったら死ぬ) | 遅い(当たったら止まる仕組みが入っている。安全) |
| 正確さ | 精度高い(めちゃくちゃ正確) | 精度低い。(危なくない様に剛性が低い為、動くと揺れたりする) |
| ティーチング | 難しい(プログラム必要) | 簡単(ダイレクトティーチングといって、ロボットの腕を人が手でつかんで教示可能。簡単) |
| ティーチングボックス | 操作難易度高い(昔のガラケーのようにボタンいっぱい) | 操作難易度低い(スマホ操作に類似) |
| 安全規格 | ISO10218(安全柵必要、非常停止ボタン必要といったルール有) | ISO15066(協働ロボット専用の規格) |
| 形状 | 6軸の多関節ロボットが標準 | 多関節に加え、人型も増加。 |
それでは協働ロボットとはどんな感じの見た目なのか見ていきましょう。
川田工業の人型協働ロボット。双腕でいかにも協働ロボットっぽいです↓

ABBの協働ロボットこちらも双腕。写真では操作者がロボットの腕をつかんでいますが、手を引っ張ると、ロボットの腕も動き、その軌跡を覚えさせる事が可能。↓

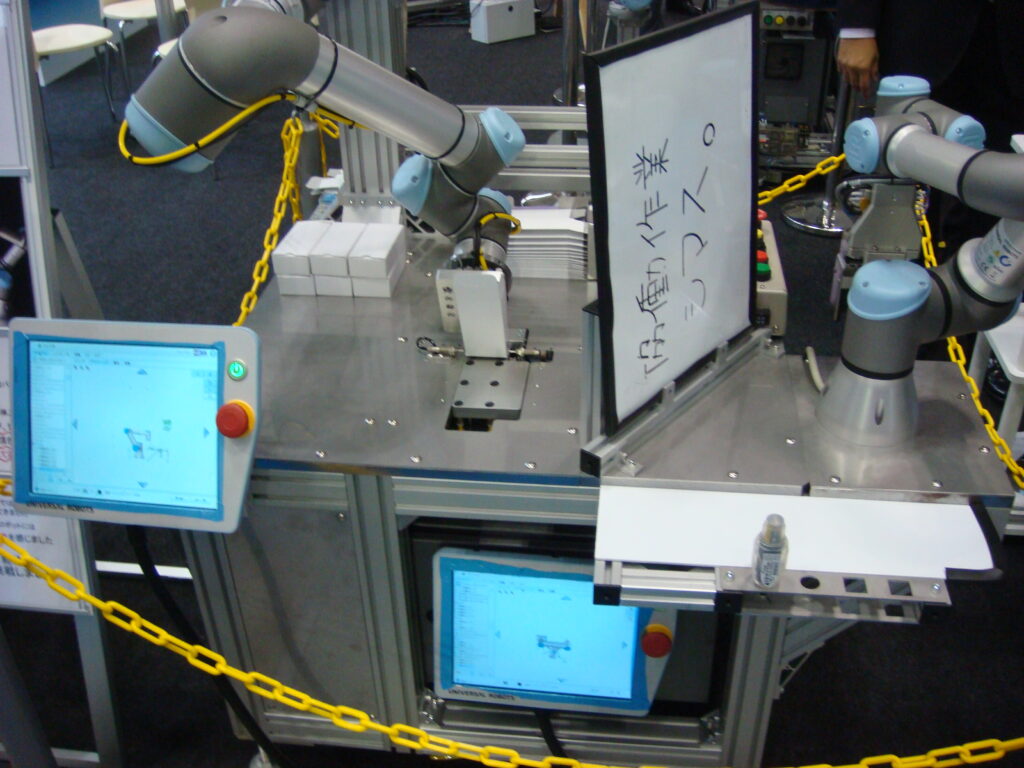
ユニバーサルロボットの協働ロボット。協働ロボットの元祖で。ダイレクトティーチングや、下の図にあるタブレット型のティーチングペンダントはここからスタートしました↓
住友重機械工業の人型協働ロボット。ユニバーサルロボットに似ています。真ん中の目が書いてあるパネルがティーチングボックスと兼用となっております↓

最後はKUKAの協働ロボット。精度が抜群に良い。くねくねして、丸みをもったボディーは人が挟まれないようにする為の安全設計の為です。↓

こういった協働ロボットがどんどん出て来て、AIとビジョンを搭載する事で、ターミネータのような脅威にさらされる危険というのも少し感じてしまいますね。しかしながらロボット工学においては次の大原則に基づき設計をする必要があり、映画のようにならないように、エンジニアは考慮し、設計していく必要があります。
第一条:ロボットは人間に危害を加えてはならない。また、その危険を看過することによって、人間に危害を及ぼしてはならない。
第二条:ロボットは人間にあたえられた命令に服従しなければならない。ただし、あたえられた命令が、第一条に反する場合は、この限りでない。
第三条:ロボットは、前掲第一条および第二条に反するおそれのないかぎり、自己をまもらなければならない。
✓まとめ
工場のモノづくりが変ろうとしています。(すでに変わりつつあります。)協働ロボットはまだまだ市場投入されて間もなく、大手企業も含め、第一弾が市場に投入されたところです。上に書いた比較表を見ると、まだまだ技術的には伸びしろがあり、このインダストリー4.0の流れに乗って、技術の進化と市場の伸長が相乗効果で、どんどんと次に未来へ向けて加速していくと思われます。本当に楽しみです。
本記事では、ほんの紹介にとどまる内容しか記載をしておりませんので、もっと深くエンジニア向けに記事を書いていこうと思います。
動画もありますので、よろしかったらご覧ください。
記事が気に入って頂けたら、クリックして頂けると嬉しいです。

コメント