インダストリー4.0(第四次産業革命)をドイツが提唱し、世界的に製造業におけるオートメーション化及びデータ化、コンピュータ化を目指す動きが活発になっています。その中で特に、産業用ロボットの需要が高まり、中には「協働ロボット」といって、従来のロボットでは絶対に必要であった、安全柵が不要なロボットが量産されるようになり、工場だけでなく、レストランのお皿洗いや、餃子づくりをロボットが実施する。という時代になっています。
ではその産業用ロボットというのは、どういう仕組み、構造で動いているのか?そういった疑問のお答えします。
本記事では、産業ロボットにフォーカスし、それを動かす為に必要なロボットコントローラの構造について、その中で特に必要な機能4種の説明をしていきたいと思います。
産業ロボットを構成する、3種のデバイス
産業ロボットを構成する製品に関しては、下の記事で説明させて頂きましたが、大きくは3つのデバイスで構成されています。
->もうそこまで未来が来ている!産業用ロボットの市場規模と未来予測
- ロボット本体
- 本記事では、産業ロボットの種類の中でも、垂直多関節ロボットとスカラロボットをターゲットに記載していきます。産業ロボットを構成するデバイスの1つ目は、もちろんロボット本体です。

そして、これらを動かす為に必要なものとして、コントローラ、ティーチングペンダント、ロボットハンド、ビジョンセンサが代表的な物として挙げられます。
- ロボットコントローラ
- ロボットを操作する為のコントローラです。後に詳しく説明しますが、ロボットコントローラは、パソコンのマザーボードのような制御基板と、モータを制御する制御基板、工場電源を元にモータを駆動させるための、コンバータ基板(工場のAC電源をDC電源に変える基板)とインバータ基板(モータを駆動させる基板)の大きく4種の基板が入っており、その他、シーケンサ等と通信接続できるようなインターフェイスを持っております。外観イメージはこんな感じです。

- ティーチングペンダント
- ロボットを操作する為の操作機です。この操作機で、ロボットを動かしたり、または、ロボットは工場の中では一定の動きをさせる必要がありますので、そのプログラムをする為にも、このティーチングペンダントは活用されます。

- ロボットを操作する為の操作機です。この操作機で、ロボットを動かしたり、または、ロボットは工場の中では一定の動きをさせる必要がありますので、そのプログラムをする為にも、このティーチングペンダントは活用されます。
このように、ロボット本体、ロボットコントローラ、ティーチングペンダントの3種が産業ロボットを構成する主要なデバイスとなります。(当然ハンドやネットワークのIF等ありますが、ここではロボットを動作させるという所に着目し、こういった記述をしました。)
ロボットコントローラの動作原理と構造。最重要の4つの機能
それでは、このロボットを動かすための動作原理と構造について説明させて頂きたいと思います。下のブロック図がロボットを動かす為の基本的なブロック図になります。
各ブロックの役割を簡単に説明していきたいと思います。詳細は別々の記事を用意し説明していきたいと思いますので、本記事では、ごくごく簡単に、ロボットを動かす。という点に着目し主な機能のみ説明していきたいと思います。
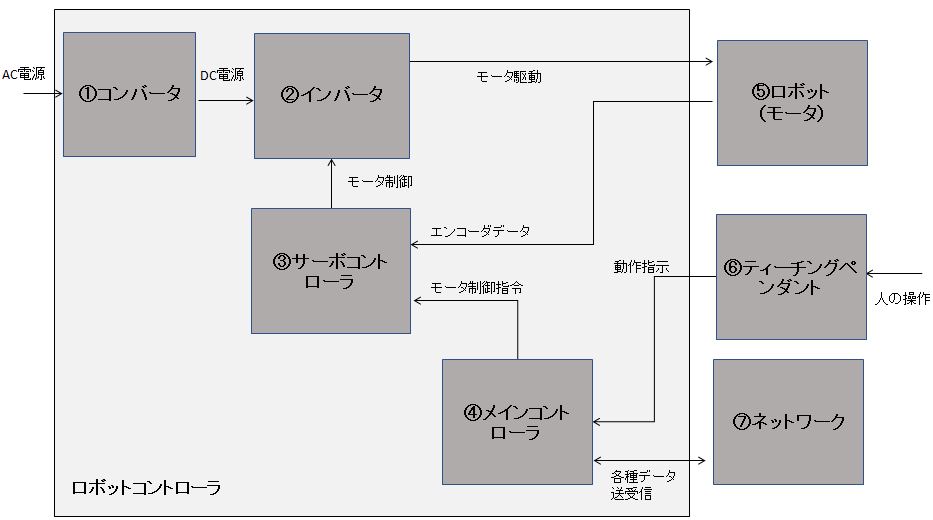
- コンバータ
- 電源を入力するブロックでAC電源をDC電源に変換する機能を主とするのがこのコンバータの機能となります。ロボットコントローラの電源は、基本、工場に配線されている電源を使うため、AC200Vくらいの電源が使われる場面が多いです。(協働ロボット等はAC100Vで設計されている物もある)この電源を使って、⑤のモータを動かすのですが、工場電源は交流ですので、この後のインバータでモータを駆動する為に、まずそれを直流に変換しないといけません。つまりAC電源をDC電源に変換する機能を主とするのがこのコンバータの機能となります。コンバータに関しては下記記事にも記載しています。
- 参考:産業ロボットの為のパワーエレクトロニクス入門。分かりやすく解説。
- インバータ
- インバータとは、「モータの回転速度を制御する」機能を持つものとなります。①のコンバータより入力されたDC電源を用いて、③のサーボコントローラの指示に従い、モータを駆動させるパルスを発生させます。そのパルスはロボットコントローラとケーブルで接続されている、⑤のロボット本体内のモータへ送られ、ロボットが動く。という仕組みとなります。インバータに関しては下記記事にも記載しています。
- 参考:産業ロボットの為のパワーエレクトロニクス入門。分かりやすく解説。
- サーボコントローラ
- サーボコントローラとは、④のメインコントローラの指示に従い、適切な量だけモータを動かす為に、②のインバータを制御する機能をもったコントローラとなります。②のインバータは③のサーボコントローラの指示に従い、モータ駆動のパルスを⑤のモータへ送信させ、モータが回ると、モータの中に入っているエンコーダ(モータの回転数をカウントするデバイス)から今モータがどの位回転しているかのフィードバックを帰し、回転が足りなければ足し、早すぎれば遅くするといったような、フィードバックコントロールを実施しています。フィードバックコントロール自体は④のメインコントローラが実施する場合もあります。
- メインコントローラ
- メインコントローラは、⑥や⑦の指示(⑥のティーチングペンダントによる動作指示や⑦のネットワークを返したプログラミング指示等)に従い、ロボットが指示された動作を実行する為に、⑤のロボットに入っている、各軸のモータを何回転させる必要があるかを計算し、指示を出す機能を持っています。その計算結果を③のサーボコントローラに渡し、②インバータに対して回転指示(PWM)信号を送ります。それ以降は上に書いた通り、インバータを用いて⑤のロボット内のモータを駆動します。基本的にメインコントローラは一定の周期で動いており、ロボットを所定の位置に動かす為の計算を毎周期実施し、実際に動いた量を③サーボコントローラから受信し、実際に動いた量から、次の周期で動かす量を計算し、また③のサーボコントローラに指示を出す。というのを、動作が完了するまで繰り返します。
- ロボット本体
- ロボット本体には各関節にモータとエンコーダが入っており、②のインバータの指示に従い、モータが動きます。その動いた量をエンコーダがカウントし、指示した回転量と、実際にモータが動いた回転量の差分を③のサーボコントローラもしくは④のメインコントローラが計算し、その差分を加味した上で、つぎの指示を出す。といったループでロボット本体が動作します。
- ティーチングペンダント
- 人とロボットとのインターフェイスとなり、この操作機を使い、ロボットを動かします。動かし方は、マニュアル操作(ラジコンのような直接的な操作)とプログラミング操作(プログラムを作り、そのプログラムに従いロボットが動く)。いづれにしてもメインコントローラに対して動作指示を送る為の機能を持っています。
- ネットワーク
- この使われ方は様々です。ロボットコントローラのステータスやロボットの動きを送信し、ネットワーク越しにロボットを監視したり、本ネットワークを通じて、⑥のティーチングペンダント同様ロボットに対して動作指示をだしたり、様々な事が実施可能です。フォーマットがいくつかあり、EtherCAT、CC-LINK,PROFINET等様々な規格が乱立している状況です。
各社のロボットコントローラのイメージは下記の通りです。ロボットの大きさによって、モータが大きくなる為、その分インバータが大きくなり、ロボットコントローラの大きさも変わります。
↓KUKA製ロボットコントローラ。大型ロボット向け

安川電機製ロボットコントローラ。中型ロボット向け。

デンソーウェーブ製ロボットコントローラ。小型~中型ロボット向け。

ユニバーサルロボット製ロボットコントローラ。小型~中型ロボット向け。

川崎重工業製ロボットコントローラ。小型~中型ロボット向け。

ファナック製ロボットコントローラ。中型ロボット向け。

✓まとめ
本記事では産業ロボットに着目し、どういう仕組み、構造で動いているのかを記載しました。ロボットを動作させる為には、ロボットコントローラが必要であり、大きな機能として、1.コンバータ、2.インバータ、3.サーボコントローラ、4、メインコントローラがあります。
ティーチングペンダント等からの動作要求に応じて、モータの駆動量をメインコントローラが計算し、その指示のもと、メインコントローラからその計算結果をサーボコントローラへ伝送。サーボコントローラはメインコントローラからの指示を、インバータが駆動できる信号へ変換し、インバータを駆動。そして、インバータの電力でロボット内のモータを動かす。またインバータは工場電源の交流を直流に変換するコンバータから電源をもらい、その電源と上記サーボコントローラからの指令を用いてモータを駆動する。
簡単に言うとこういった仕組みで動いています。これだけ聞くと非常にシンプルですが、大電流、高電圧を扱う事、ロボットは人に当たったら、人が死んでしまう。という危険な物で、誤動作が絶対に起きないような仕組みが入っております。
これを機能安全と言い。ロボットコントローラを設計する上では、欠かせない知識となりますので、また別の記事で説明していきたいと思います。
今回は産業ロボットの構成と、動作原理をシンプルに説明させて頂きました。
協働ロボットに関する記事も書いておりますので、よろしければご覧ください。
->協働ロボットの市場と各メーカの特徴比較。これからの主役は協働ロボット
ロボットのパワエレに関する記事は下記ご覧いただければと思います。
->産業ロボットの為のパワーエレクトロニクス入門。分かりやすく解説。
動画でも構成されていますので、よろしければご覧ください。
記事が気に入って頂けたら、クリックして頂けると嬉しいです。


コメント