
昨今、様々な場面でパワーエレクトロニクスの技術が活用されています。その中で、身近には、自動車とロボットへの応用がありますが、本記事では、主に産業用ロボットを動かす為のパワーエレクトロニクスとはどういったものか。という事を分かりやすく解説したいと思います。
産業ロボットを動かすパワーエレクトロニクス概要
産業用ロボットを動かす為のパワーエレクトロニクスの技術に関して説明したいと思います。
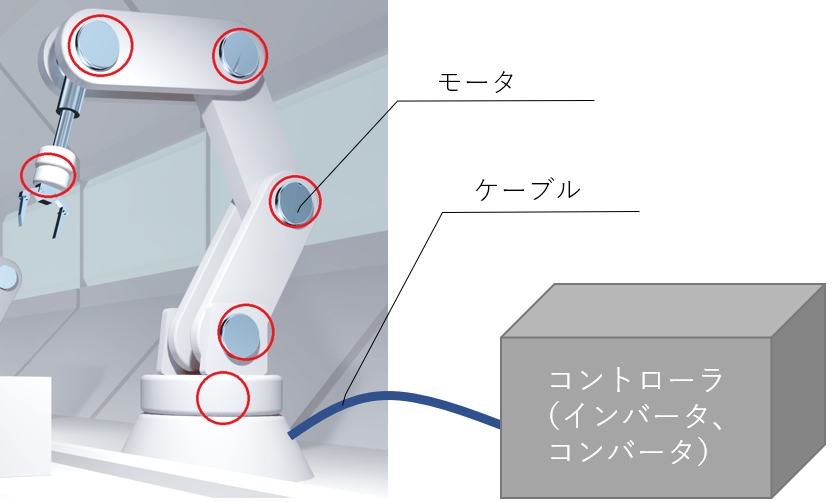
ここでは6軸のロボットを題材に説明したいと思いますが、ロボットの各関節にはモーターが入っています。そしてそれをコントロールする為のインバータがあり、インバータを制御するコントローラとインバータにDC電源を渡すためのコンバータがあります。今回は、この中で、コンバータ、インバータ、モータの3つの技術をどのように使ってロボットを動かしているのか、解説したいと思います。
イメージは下の図です。赤丸で囲んだ各ロボットの関節にモータ、右のコントローラと書いた箱の中に、インバータやコンバータが入っています。そして、ロボットとコントローラを繋いだケーブルの中を動力が通り、各モータを駆動させています。中にはこのコントローラがロボットの本体の中に組み込まれている物もあります。
コンバータの役割
コンバータの役割は、AC電源をDC電源に変える事です。
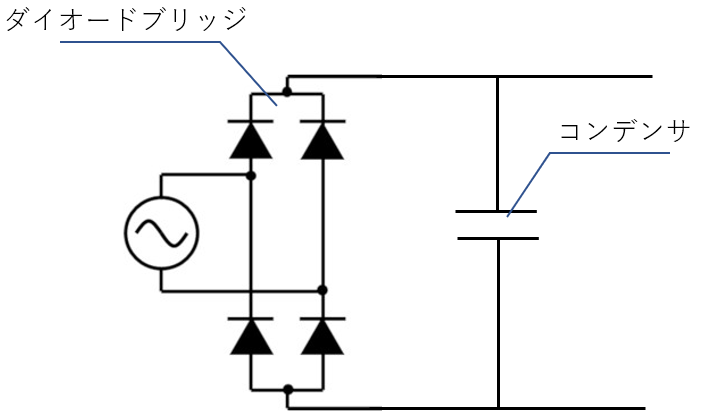
コンバータ回路で使われる、メインの回路はダイオードブリッジ回路です。
産業ロボットの回路を作る為には、低電圧指令を満足するよう設計する必要がありますので、細かい事を言うと、このコンバータには、安全設計する為の多くの仕組みを入れる必要がありますが、本記事では、ダイオードブリッジだけに触れたいと思います。低電圧指令に関しては下記の記事を参照お願いいたします。
参考:CEマークと、機械指令、低電圧指令、EMC指令について解説します。
ダイオードブリッジを含む、コンバータの回路は、下記のような回路です。左の電源は工業電源ですので、日本だと200Vである場合が多いです。
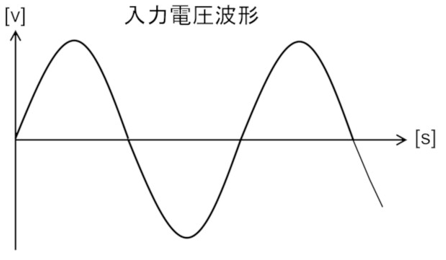
3ステップで、入力のAC電源が出力のDC電源に変換される過程を示したいと思います。
①入力電源の波形は下記。普通の交流です。
②ダイオードブリッジを通ると、マイナス側の電圧が折り返され、下記のように変化
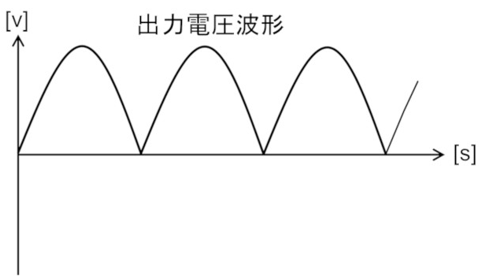
③ダイオードブリッジの後、コンデンサで平滑化され、波形は下記赤線のような波形に変化。
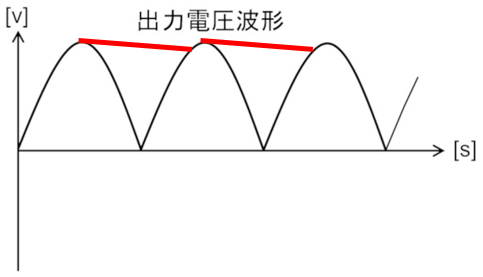
こうして入力のAC電源から、DC電源を作る事がコンバータの役割です。この時の電圧は、入力が交流200Vだとすると、200Vx√2で、約280VのDC電源が出力電圧となります。
インバータの役割
インバータの役割は、DC電源から、モータを駆動させる、PWM波形を生成する事です。
PWM方式により、矩形波のパルス電圧を出力し、モータのインダクタンスにより、電流は正弦波となります。インバータの回路は単純に下記の図のようになります。
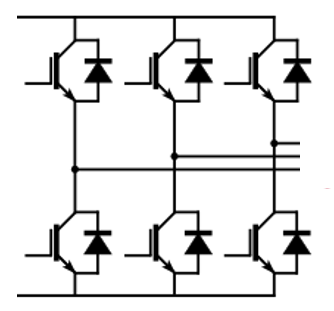
このトランジスタスイッチがオンオフをし、PWM制御をする事で、モータを駆動する波形を作ります。イメージは下の図の通りであり、PWM制御のDuty比を変え、Duty比が高い時は電圧が高く、Duty比が低い時は電圧が低くなり、交流を作ります、そしてその回路が3つついている事で、3相モータを駆動し、ロボットを動かします。
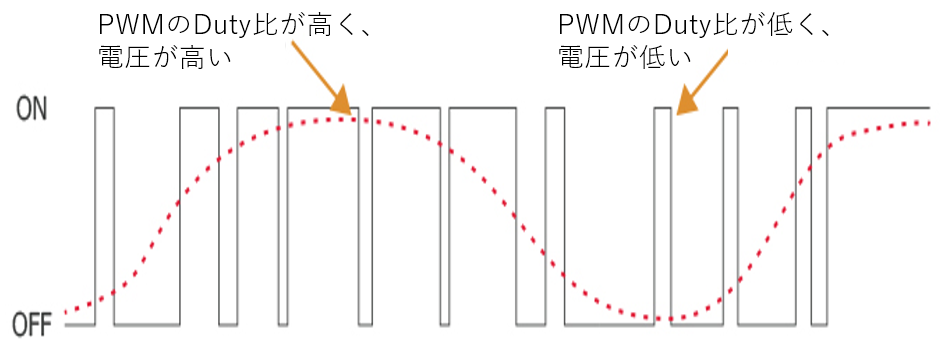
このDutyのコントロールは、コントローラで行っており、どのようにモータを駆動させるべきかを計算し、インバータ内のトランジスタ(IGBT等)を動かします。
まとめ
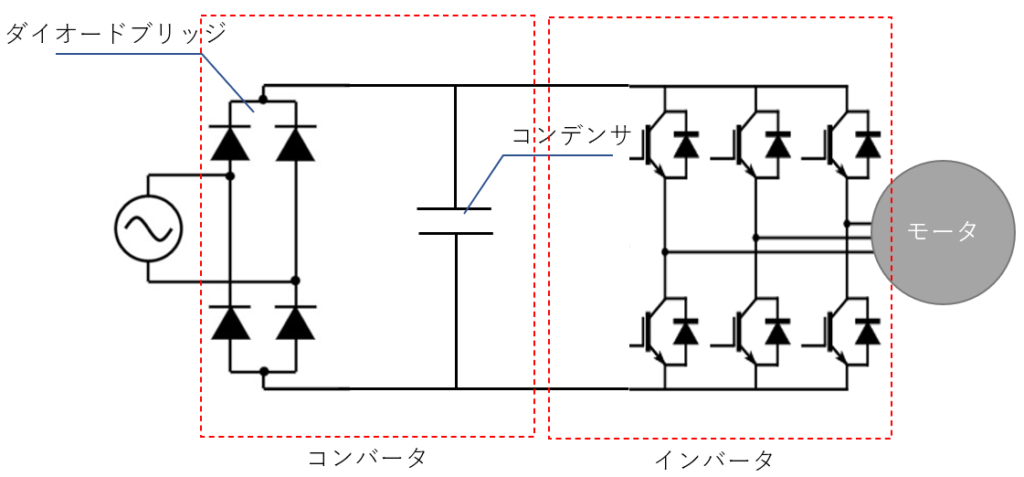
コンバータとインバータを合体させて回路は次のようになります。
交流電源を、ダイオードブリッジでプラスの電圧に変換、その後コンデンサで直流に変換、その後インバータでPWM波形を作り、モータを駆動する。
これが産業用ロボットを動かす為のパワーエレクトロニクスの基礎となります。
記事が気に入って頂けたら、クリックして頂けると嬉しいです。

コメント