
iPhoneがリリースされると、ホームページにその技術仕様が公開されます。しかしながらその仕様を深く理解する事は難しいのではないでしょうか?その結果、バージョンが上がった時に何が変わったのか分からないという事も少なくないと思います。本記事では、iPhoneだけでなく、その他のスマートフォンにも共通して使える、スマホの仕様が読めるようになる為の解説を、技術的に、かつ出来るだけ分かりやすくしていきたいと思います。今回はiPhone13Proに搭載されている、LiDARスキャナ編です。
LiDARスキャナとは
LiDARとは、「Light Detection and Ranging」や、「Laser Imaging Detection and Ranging」の頭文字をとったもので、レーザーを使った距離センサです。
後に詳しく原理を解説しますが、物体にレーザ光を照射し、その反射光が戻ってきた時間や波長から、物体の形状や距離を測定する技術の一つです。
本技術は自動運転車の、車と周辺の物体の距離を認識するにも使われている技術で、今後いろいろな場面で幅広く使われると予想されます。
iPhoneではどのように活用されているか?
技術仕様では、主にポートレートでの活用がメインの効果として仕様には記載されているようです。
ポートレート機能とは次の機能の事です。本来一眼レフなど、被写界深度の狭いレンズを用いて撮影していたポートレートですが、距離センサを用いる事で、被写体の距離が分かる為、レンズの光学特性でボケさせるのではなく、距離に応じ、画像処理でボケを作る事で、あたかも一眼レフで撮影したポートレートのような効果を得る事ができます。
ポートレート機能:背景をぼかして省略し、背景から人物を際立たせるような写真をとる機能
■iPhone13Pro技術仕様
その他、距離を測定するという仕組み上、次の1~3のような効果が様々なホームページで報告されています。1,2は距離を測定できる特性上分かりやすいアプリケーションですが、3に関して少し補足したいと思います。AF(オートフォーカス)は本来レンズを一度動かし、もっともコントラストが強い所でレンズを止める。という仕組みですが、その動くスピードはフレームレートに依存します。暗い箇所ではフレームレートが遅くなるので、AFも遅くなってしまいます。
そこで、この距離センサが活躍でき、一瞬で物体までの距離が分かるので、一瞬でその距離に応じてレンズを適切な位置に移動させる事が可能となる為、AFの速度アップが可能となります。
- 被写体の長さ測定
- 3Dスキャン
- 暗い箇所でのオートフォーカスの高速化
レンズのアクチュエータに関しては下記の記事でも記載しておりますので、よろしかったらご覧ください。
参考:iPhone13Proの技術仕様を分かりやすく解説。レンズアクチュエータ編
LiDARスキャナの動作原理
それではLiDARの動作原理を解説します。iPhone13ProのLiDARモジュールはこの写真の通りです。2つ正面に見えている丸い物ですが、片方がセンサ部、片方がレーザの発光部です。

上記写真のイメージを図示すると下のような図となります。1,2,3はそれぞれ下のようになります
- 受光素子
- どのようなセンサなのかは定かではありませんが、SPADであるという事が現時点での有力候補です。SPADとはソニーが開発した、SPAD(Single Photon Avalanche Diode)画素を用いた積層型直接Time of Flight (dToF) 方式の距離センサーで、通常のセンサより高精度かつ高速に測定できる事を特徴としたセンサです。上の写真だけだと分かりませんが、仮にこの受光素子を使っているとすると、この素子の上にレンズが付いている事になります。
- ToFに関しては別の記事を書いておりますので、よろしかったらご覧ください。
- 参考:ソニーも狙っている、次世代センサ、ToF(Time of Flight )センサの原理説明
- 発光素子
- この発光素子も13Proとしては明確には開示されてはいないですが、VCSELである事が現時点では有力です。VCSELとは、Vertical Cavity Surface Emitting Laserの略で、表面実装した基板に対し垂直方向にレーザーを射出する光源です。
- DOE
- VCSELの前にはDOEが置かれています。DOEとは、Diffractive Optical Element:回折光学素子で、計算された微細形状によって光の回折現象を制御する光学素子です。光学センサーや照明などにおいて、光を狙ったところに効率よく照射したり、特殊なパターン状の光を照射したりすることが可能になります。今回の使われ方の場合、2のVCSELは、レーザーですので、単一方向にしか光は発光できませんが、それをこのDOEを通す事でこの図のように拡散させ、光源は1つで、レーザー光線をあらゆる方向に放射させる事ができます。
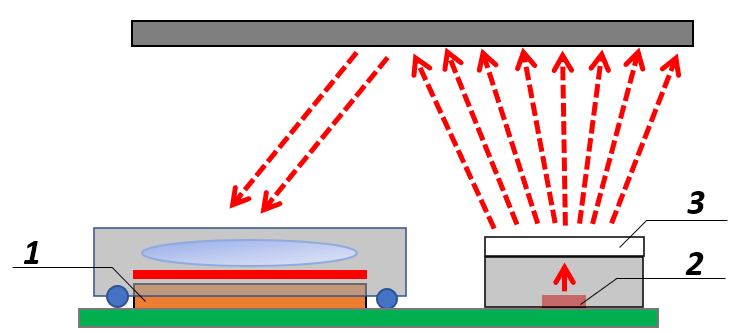
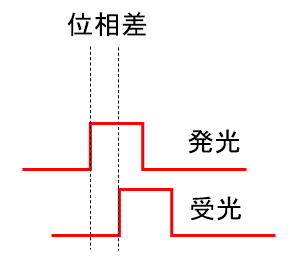
これら、1~3まとめると、VCSELで発光したレーザー光を、DOEで拡散させ、それを、受光素子であるSPADで受光、その際、レーザー光はパルス状の波形を発光する事で、発光した波形と、受光した波形の時間差を測定する事で、距離の測定が可能となります。発光パルスと受光パルスの位相差とは下記のようなイメージとなります。
受光素子であるSPADは一般的なイメージセンサのように、受光素子がマトリクス状に並んでいるセンサの為、DOEによる拡散されたレーザの反射光を各画素で受光し、各画素で位相差を計算する事で、被写体の3D形状を認識します。
これが、LiDARスキャナです。
その他参考記事は下記↓
参考:【徹底解説】LiDARとは?自動運転、スマホ、あらゆる場面で今後活躍必至。
下記でiPhoneレンズの仕様も解説しています。
参考:どこがすごい?iPhone14のカメラ。技術仕様を簡単に解説します。
参考:iPhoneの技術仕様を分かりやすく解説。その1:レンズ仕様編
参考:iPhone13Proの技術仕様を分かりやすく解説。レンズアクチュエータ編
参考:iPhone13Proの技術仕様をわかりやすく解説。光学ズーム、デジタルズーム編
記事が気に入って頂けたら、クリックして頂けると嬉しいです。


コメント