
最近の車の多くの車に、先進運転支援システム(ADAS)機能が搭載されており、中でも、衝突軽減ブレーキ(AEB)、オートクルーズコントロール(ACC)、レーンキープアシスト(LKA)といった機能がメジャーになってきておりますが、これらの機能を達成する為、カメラやレーダーを活用したシステムの開発が進んできております。
その中で、今回はステレオカメラを活用したシステムに関して、その役割と距離測定の原理について、説明していきたいと思います。
先進運転支援システムの為のデバイス構造
自動運転を実現する為に、多くのメーカが多くの開発を進めております。最近発売される多くの車両には、衝突軽減ブレーキ(AEB)、オートクルーズコントロール(ACC)、レーンキープアシスト(LKA)といった運転支援の機能が付いてきており、その機能を実現する為のデバイスとして、「カメラ」「LiDAR」「ミリ波」といったデバイスが使われております。
現在発売されている乗用車の多くは、「カメラ」と「ミリ波」を組み合わせた製品が多く、カメラを用いて、前方にある車両、人、自転車を検出すると同時に白線を認識し、ものが接近したかどうかを「ミリ波」で距離を検知し、その組み合わせで、人が急に車の前へ出て来た時に緊急時にブレーキをかける。といった仕組みとなっている場合が多いです。
しかしながら、上記を実現する為には、「カメラ」と「ミリ波」の双方が必要となってしまい、軽自動車等では配置できるスペースが無く、搭載が難しいという課題がありました。
そこで考えられたのが、「ステレオカメラ」です。
自動運転必要はカメラの役割は下記を参照いただければ幸いです。
参考:自動運転に必要な車載カメラモジュールの5つ役割【自動運転には必須】
自動運転に関わる用語は下記参照いただければ幸いです。
参考:自動運転に関わる難しい英語の略語27個を、分かりやすく解説します
ステレオカメラの役割

前のトピックで記載したように、車両の前への飛び出しによる衝突を未然に防ぐ為には、
・何が車の前にあるのか?
・それは車に対しどのくらいの距離にあるのか?
この2点が分かっていないといけません。これを1つのデバイスで認識出来る物が「ステレオカメラ」となります。
つまり、ステレオカメラでは、通常のカメラ同様、風景を撮像すると同時に、物体までの距離も測定できてしまうという、1人2役の役割を持っています。
これを使えば、従来活用していた、ミリ波は不要となり、ステレオカメラだけで、物の認識と、車とそのものの距離を測定し、衝突軽減ブレーキ(AEB)、オートクルーズコントロール(ACC)、レーンキープアシスト(LKA)といった機能を実現する事が可能となります。
ステレオカメラの距離測定原理
ステレオカメラは人間の目と同じように、2つの全く同じ性能をもつカメラを2台使って実現します。
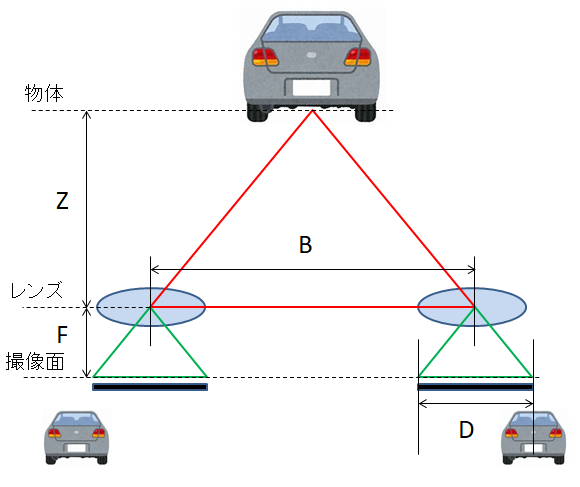
下の図のそれぞれの記号の意味は次の通りです。
- Z:物体までの距離(カメラから物体までの距離。これが求めたい距離)
- F:焦点距離(レンズの中心の「主点」から撮像素子に結像するまでの距離)→ こちら参照
- B:カメラ間距離(ステレオカメラの2つのカメラの距離)
- D:視差(左右のカメラで被写体を撮像した時の被写体の位置の差。三角形底辺の右側が右のカメラで撮像した、被写体の位置、底辺の左側が左のカメラで撮像した被写体の撮像位置。)
赤の三角形:カメラ間距離を底辺、物体までの距離を高さとした三角形
緑の三角形:視差を底辺、焦点距離を高さとした三角形
この2つの三角形は相似の関係にある為、次の式が成立します。
物体までの距離(Z): カメラ間距離(B) = 焦点距離(F): 視差(D)
つまり、物体までの距離(Z)=(カメラ間距離(B)x 焦点距離(F))/ 視差(D)
となります。この計算式を用いる事で、ステレオカメラ1台で、物体までの距離を測定する事が可能となります。
ステレオカメラの課題
今まで、ステレオカメラは、距離も測定でき、物体の認識もでき、いい所ばかりを説明してきました。しかしながら課題も多くあります。主要な課題は次の通りです。
- 2つのカメラの搭載位置が非常に厳密であり、その維持が困難
- 視差から距離を求める為、2つのカメラの位置精度は非常に厳密です。製品の組み立て時にキャリブレーションや位置決めが必要である事はもちろん、車載の場合、何年経っても、高温、低温の過酷な環境であっても、その位置が変化してはいけません。つまり、製品の精度、材料が非常に高くなる。というデメリットがあります。
- 今後レンズの広角化が進むにつれて、レンズ歪の影響が発生する
- 今後衝突軽減ブレーキは、飛び出し等への対応の為、カメラの画角を広くしていく必要が出てきます。レンズは広角にするにつれて歪が発生してくるのですが、そのような歪やその補正具合も、左右で全く同じにしないといけません。レンズの設計もシビアな精度が求められるという事が課題となります。
- 2つの映像を扱うため、処理不可が大きい
- 車載カメラの画素は、携帯電話同様、どんどん高画素化していく事が想定されます。2つのカメラを扱う為、必然的にそれを処理するSoCの負荷が高くなります。逆にミリ波等は非常に軽い負荷で距離測定が可能でありますが、取り付ける場所の確保が困難であるというデメリットもあり、一長一短です。
✓まとめ
ステレオカメラに関して、役割と原理に関してまとめました。国内では、スバル、ダイハツ、トヨタで採用されており(他にもあるかもしれませんが、すみません。情報不足で分かりません)安全機能として活用されております。今後伸びていくのか、それともミリ波ですべて距離の測定は置き換えられてしまうのか、どうなるのか楽しみです。
記事が気に入って頂けたら、クリックして頂けると嬉しいです。


コメント