近年多くの自動車メーカから「ドライバーモニタリングシステム」が製品化されてきています。ドライバーをモニターするシステムって何の為についているの?と思われている方もいると思います。また、自動車業界で働いているエンジニアの方の中には、聞いたことがあるけどどんな機能が付いているの?どんなカメラを使っている?と思われている方も多いと思います。
そんな疑問にお答え致します。
本記事ではそんな疑問を持たれている方に、ドライバーモニタリングシステムの役割、と機能の説明。また、どんなカメラの仕様になっているかを、初級編としてご紹介していきたいと思います。
ドライバーモニタリングシステムの役割

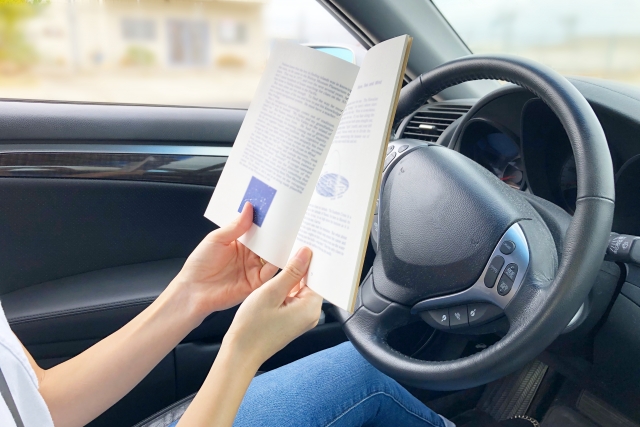
ドライバーモニタリングシステムとは、ドライバをモニタリングし、居眠りや脇見時に警報をならす役割を持ったデバイスです。
下記の記事にも概略を記載させて頂いておりますので、よろしかったらご確認ください。
-> 自動運転に必要な車載カメラモジュールの5つ役割【自動運転には必須】
もともとは、トラックやバスでの居眠り事故の防止を目的に製品が作られ始め、今では乗用車へも展開されている製品であり、自動運転有無にかかわらず、ドライバの居眠りや脇見が原因で発生する事故を防ぐ。というのが本製品の目的となります。
自動運転になればドライバがわき見してても良いからいらなくなるのでは?と思われる方もいるかと思いますが、少なくともLevel3の自動運転までは必須な機能となります。その内容を簡単に説明したいと思います。
まず、Level2までの自動運転ですが、責任は人にある為、例え、前車自動追従機能やレーンキープアシスト機能という機能があったとしても、ドライバは運転できる状態を維持しておかなければいけません。また、運転している時同様、前を見ていなければいけません。
Level2までの自動運転車は、言ってみれば、システムの異常で事故る可能性がある為、ドライバはちゃんと車の挙動を見ていて、いつでも運転交代できる状態にいなければいけない車両です。よそ見していて事故を起こしたら、システム異常が原因であっても、事故の責任は人にある。という車両です。
ですので、脇見や居眠りをしない為に、このドライバーモニタリングシステムで、例え自動追尾中であっても、脇見や居眠りをしていたらアラームを上げる等の機能で運転手に注意を促す為に必要な装置となります。
次にLevel3の自動運転車になると、責任区分が人からシステムに変わります。システム異常で事故を起こした場合は、人ではなくシステムの責任となります。つまり自動車メーカが事故の責任を負います。ただ、この時の注意点は、正しい使い方をしている場合に限る。という事を忘れてはいけません。
Level3の自動運転車は「部分的な自動化」が可能なだけです。つまりシステムは今自動運転が可能かどうかを判断し、出来る環境においては自動運転を動かし、出来ない環境においては、ドライバに対し、運転交代を促します。例えば大雨や霧で視界が全く見えない場合や、住宅街の複雑な路面等、自動運転が難しい場合はドライバは即座に対応しなければいけません。
つまり、ドライバは脇見はしていてもいいけど、居眠りしていてはいけない。(車が運転交代してほしいと要求したら、ドライバはすぐに運転できる状態になっていないといけない。)という事になります。
そのため、ドライバーモニタリングシステムは、Level3自動運転車においても、自動運転中は居眠りの確認をし、通常運転中は、Level2以下同様、居眠り、脇見を確認する機能が必要となります。
これらの機能が無く、自動運転機能に身をゆだねて事故を起こしてしまわないように、自動運転車両にはセットでこのドライバーモニタリングシステムが付いてくることが予想されます。
これが、ドライバーモニタリングシステムの役割となります。
ドライバーモニタリングシステムの機能説明
それでは、ドライバーモニタリングシステムの代表的な機能を簡単説明していきたいと思います。脇見や居眠りによる危険予防の判定だけでなく、顔認証や表情判定、ジェスチャ機能といったように、今後ますます応用編として活用されることが期待されるシステムになると思います。
| 機能 | 説明 |
| 居眠り判定 | ドライバモニタリングの基本的な機能。ドライバが眠っているかどうかを判定。 |
| 眠気判定 | 居眠り判定に近いですが、ドライバがどの位眠そうかを判定。眠るまでの過程を段階的に判断します。 |
| 脇見判定 | ドライバモニタリングの基本機能。ドライバがわき見をしているかどうかを判定。 |
| ドライバ異常状態判定 | ドライバに異常な状態が発生していないかを判定。 例えば発作が起きて運転出来ない状態になってしまった時、気絶してしまった時、このような異常状態を判断します。 |
| 注視方向判定 | 主に視線方向を識別して、ドライバがどこを向いているかを判断します。 例えば顔は正面を向いていて、視線はナビを見ている。といった状況の時、それは運転に注視していない。(脇見)という判定をする事になります |
| 顔認識 | スマホの顔認識同様。個人の特定をする為に用いられます。 車の場合、個人を特定し、運転席やミラーを自動調整したり、例えば盗難防止で、車のオーナーではない場合はエンジンが始動しない。といった使い方が考えられます。 |
| 表情判定 | こちらは応用機能です。顔の表情を認識し、ストレスのある時は軽減するような音楽をかけたり、暑そうであればエアコンの温度を下げたり。そういった機能です。 |
| ジェスチャ判定 | これはドライバのモニタリングとは少し変わってしまいますが、応用編として、しぐさを判断する機能です。例えばナビのスクロール時にナビを触らなくてもジェスチャだけで操作。 といった事も出来るようになるかもしれません。 |
ドライバーモニタリング用カメラの概略仕様
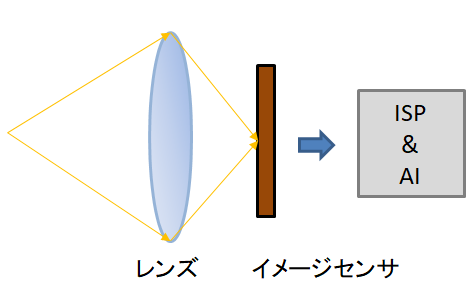
それでは最後にエンジニア向けにドライバモニタリングシステムで活用されているカメラについて説明をしていきたいと思います。カメラモジュールが光をレンズで受けて、イメージセンサでその光を電気に変え、その後ISP(Image Signal Processor)を通し、「AI」で上に記載した機能を認識する。といった、基本的なデータフローは下の記事で説明をさせていただいた内容と同じです。
->自動運転に必要な車載カメラモジュールの5つ役割【自動運転には必須】
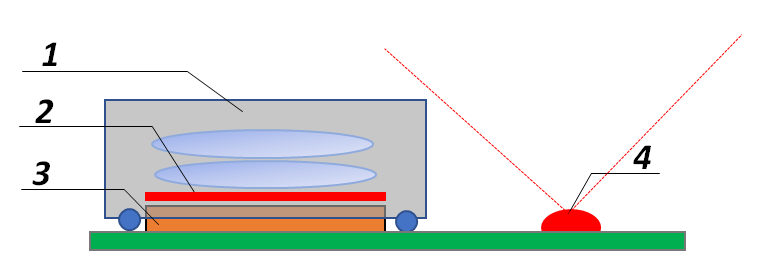
今回、このドライバーモニタリングシステムの特徴は、カメラだけでなく、赤外線の照明を使っている所が、最も大きな特徴となります。構造は下図。左側が「カメラ」右側が「赤外照明」です。赤外線で照らしたドライバの顔をカメラで撮像するというのが基本的な仕組みとなります。
何故赤外照明を使っているか?ですが、理由は2つあります。
- 夜間もドライバをモニターする必要がある為
- ドライバモニタリングシステムの基本的な役割は、ドライバの居眠りや脇見を見る事であり、昼も夜もそれは動いていなければいけません。昼間は太陽の光があるので問題ないですが、夜間は外光が無い為、カメラで撮影する為には、照明が必要です。それを通常の(可視光の)照明を使ってしまうと、ドライバに常に光を当てていないといけないので、うっとうしいですよね。そこで、人間の目には見えない、赤外線の光を当て、その反射光をカメラで撮影する。といった事が主流になっています。
- サングラスを透過する必要がある為
- もう1つの理由として、ドライバモニタリングシステムは、居眠り、眠気を判定しないといけません。しかしながら、サングラスをしていたら目は見えないですよね。それが赤外線を当てると、あら不思議、サングラスを透過して、目が見えるようになります。その為に赤外線が使われています。
これらの内容も踏まえ、ドライバーモニタリングシステムの構造を上の図に従い、簡単に説明していきたいと思います。基本的なカメラの構造は、「モノづくりエンジニアの為のカメラモジュールの構造」で説明した内容と同じになりますので、ドライバーモニタリングシステム特異な点について詳しく説明をさせていただきたいと思います。
- レンズ(カメラ部)
- レンズに関しては「まずはこれだけで合格点。カメラを設計する為のレンズの基礎知識」の記事で基本的な内容を説明させて頂きました。その内容と概ね同じですが、1点だけ違いがあり、それは赤外線専用レンズである事です。赤外線専用とは何か?ですが、レンズには様々な収差があると、レンズの基礎知識の記事で説明をさせていただきました。その収差は光の波長が広ければ広いほど抑える事が難しくなる為、通常のレンズは可視光で収差が出ない様にレンズが設計されています。つまり赤外線では収差がある。という事です。そのままこのドライバモニタリングシステムに通常のレンズを使ってしまうと、ピントが合っていないような、ボケた画像になってしまいます。そこで、赤外線の波長に特化した、専用レンズで、赤外の帯域で収差が発生しない。という専用レンズを用います。レンズに関する記事もご参照お願いします。
- まずはこれだけで合格点。カメラを設計する為のレンズの基礎知識
- BPF(バンドパスフィルター)
- 聞きなれない言葉だと思いますが、簡単に説明していきたいと思います。BPFとは、特定波長の光を透過させ、それ以外をカットするフィルタの事です。ドライバモニタリングシステムは赤外の光しか扱わない為、赤外線以外光をカットする(透過させず、イメージセンサには取り込まないようにする)為に、本フィルタを用います。
- イメージセンサ
- これも赤外線用イメージャを用います。イメージセンサ―は通常カラーフィルタという物が付いており、R,G,Bの色を再現し、その3原色から様々な色を作ります。しかしながら赤外線専用カメラの場合はカラーは必要ありませんので、モノクロのイメージャを使う事になります。監視カメラの映像が白黒であるのも同じ原理です。イメージセンサに関する記事は下記の記事を参照お願いします。
- モノづくりエンジニアの為の、CMOSイメージセンサの基本原理
- 赤外照明
- 赤外照明です。役割は上に記載しましたので、ここでは割愛をさせていただきたいと思います。
✓まとめ
いかがでしたでしょうか?ドライバモニタリングシステムの役割、機能、カメラ仕様について説明させて頂きました。今後Level2,3の車両が主流になってくる辺りで、皆様の車には必ずついてくる機能となると思います。その後Level4,5の自動運転車となると、居眠りや脇見をしていても問題ない車両となる為、本機能は不要となる可能性があり、製品としては短命な物なのかなといった印象を持っています。しかしながら、Level4,5になってくると、今度は居眠り脇見ではなく、ロボットタクシーの忘れ物検知であったり、乗客の緊急事態への対応といったような、違う使われかなになっていくのかなと私は思います(私見です)
機能は異なりますが、車室内カメラや、ドライブレコーダの記事も書いておりますので、よろしければご覧いただければ幸いです。
参考:【次世代】RGB-IRイメージセンサ―とAIを活用した、車室内カメラ
参考:エンジニア視点で考察。ドライブレコーダーのおすすめ2021年版
記事が気に入って頂けたら、クリックして頂けると嬉しいです。
コメント