近年いろいろと注目を浴びている、自動運転ですが、その機能って何があるの?と思われている方も多いと思います。また、車載カメラが使われているっぽいけど、どんなカメラがどのように使われているの?と思われているエンジニアの方もいるかと思います。
そんな疑問にお答えいたします。
本記事では、自動運転の概略、車載カメラモジュールを用いた自動運転システムの機能の説明、またエンジニア向けには、その機能を実現している車載カメラモジュールの概略仕様を説明していきたいと思います。
自動運転のレベル分け
すでにご存じの方も多いと思いますし、他の記事でも多く記載されている内容ですので、ここではさらっと説明させて頂きたいと思います。自動運転のレベル分けは次の表のようになっております。重要なポイントは「責任」の欄です。Level2までは責任が「人」に対し、Level3以上は責任が「システム」となります。つまりLevel3以上は事故発生時の責任は車両メーカになる為、特に日本では、Level3以上の車両を出す事に慎重になっています。この記事を書いている2021年4月時点では国産車ではホンダのレジェンドのみがLevel3を達成しており、その他日産、トヨタのシステムはLevel2となっています。
| Level | 概略説明 | 備考 | 責任 | 走行領域 |
| 0 | 旧来の車 | 運転の自動化なし | 人 | 適用外 |
| 1 | 「運転支援機能装備」 | 車両運動制御のタスクを限定的に実施 例:前の車について走る 車線からはみ出さない 自動で止まる(自動ブレーキ) ※衝突被害軽減ブレーキは2021/11には新型車への搭載義務化、2025/12月にはすべての車両への搭載が義務化予定 | 人 | 限定的 |
| 2 | 「部分的な運転の自動化(ハンズオフが可能)」 | 特定条件下での自動運転機能装備 例:車線を維持しながら前の車について走る 高速道路において、遅い車を追い越す 高速道路の合流を自動で行う | 人 | 限定的 |
| 3 | 「条件付き自動運転(アイズオフが可能)」 | 限定条件下でシステムがすべての動的運動タスクを実行する。ただし、作動が困難な場合はドライバが即座に応答しなければならない。(つまり、車両主導の完全自動運転機能が入っているが、システムが困った時はドライバにすぐ交代する必要がある、その為、ドライバは寝ていてはいけなく、すぐ運転が出来る状態でないといけない) | システム | 限定的 |
| 4 | 「高度運転自動化(ブレインオフの水準)」 | 限定条件下でシステムがすべての動的運動タスクを実行する。Level3との違いは緊急時であってもドライバが運転を引き継ぐ必要はない。「限定条件下」での自動運転である為、限定領域外で走行する場合に備え、ハンドル、アクセルと搭載した車両と、限定領域内のみで走行する2タイプの車両が想定。 | システム | 限定的 |
| 5 | 完全自動運転 | いかなる場所、いかなる状況下においても自動運転システムがすべてのタスクを担う完全自動運転。ハンドル、アクセルはもういらない。 | システム | 限定なし |
自動運転の5つの機能
自動運転といっても色々機能がありますが、必要な基本機能として、次の5点があげられます。これら5点の機能の性能を上げていき、技術を組み合わせる事で、様々な自動運転アプリケーションを実現していきます。
また、本記事ではカメラをメインに記載をしていきますが、これらの機能はカメラだけで実現する事は不可能です。理由はカメラは撮像出来る物しか認識できない為、天候が悪く視界が悪い時、カメラのレンズに直射の光が入ってしまった時等、人が目で見て難しいシチュエーションはカメラでも難しいというのが現状です。
そこで活躍するのが「LiDER」です。「LiDER」とはレーザ照射に対する散乱や反射光を測定する事で物体までの距離を測定する為の物で、霧や雨等で視界が悪い時には特に活躍出来ますが、弱点としては色彩の識別が出来ない。というデメリットがあります。
そこで、色彩をしっかり識別できるカメラと、距離を正確に測定可能なLiDERを組み合わせて次の機能を実現している、というのが現在の自動運転技術となります。
- 衝突被害軽減ブレーキ機能
- 前方との衝突を予測し、自動でブレーキを作動する事で、衝突時の被害を軽減する機能。
- 前車自動追従機能
- 高速道路等で、速度や前走者との車間距離を一定に保ったまま追尾する機能。前走者が速度を落とせば、同時に速度を落とし、設定された速度以上のスピードの場合は設定速度以上にはならずに追従をやめ、指定速度で走行を継続する。
- レーンキープアシスト機能
- 高速道路等で、白線を認識し、車線の中央付近を走行するように、自動制御する機能。
- 分岐、レーンチェンジ、追い越しアシスト機能
- 2021/4時点では自動にこれらをやってくれるのではなく、車両がこれらのタイミングを判断しドライバーに提案する。という機能
- 駐車支援機能
- 後退駐車時、ハンドルを自動制御して、後退駐車を補助する機能
直接的に自動運転には現在は繋がっていませんが、自動制御という意味では、次の機能もあります。
- ハイビーム自動制御機能
- 人や車両を検出して、ハイビームをするしないの自動制御。また、複数個の光源がヘッドライトに入っていて、オンオフの切り替えだけでなく、人や車両を検出し、そのエリアのみ、眩しくないように光源をコントロールするような機能もあります。
- ドライバー異常時対応システム
- ドライバをモニタリングし、居眠りや脇見時に警報をならす機能。Level2までは責任が人である為、ドライバは運転状態を維持しておかなければいけない為、わき見や居眠り時に警告が必要。またLevel3になったとしても、システムからの運転交代がすぐに出来ないといけない為、脇見はしていても良いが、寝ていてはいけない為、閉眼時には警告をする必要がある。将来的にはドライバ緊急時に車両を止めるといった機能も予想される。
- 先行者発進告知
- 信号待ちや渋滞で止まっていた後に、前の車が動いた事を通知する機能。通知だけでなく、自動追従、レーンキープアシストとの組み合わせにより、渋滞時の自動運転(前へ進めば自動追尾で進み、先行者が止まれば停止する)を可能とする。
自動運転を実現するカメラモジュールの概略仕様
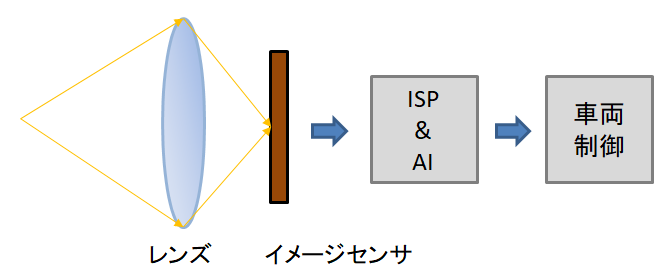
これまで、自動運転を実現する為の機能の説明をしてきました。それではやっとエンジニアっぽい話に移りたいと思います。これらの機能を実現する為に、カメラはどんな仕様であるべきなのか?について概略を説明していきたいと思います。カメラモジュールの基本構造は下記参照お願いいたします。
自動運転で用いられるカメラの機能は、昔のようにカメラ映像を画像処理をして、といった技術ではなく、そのほとんどが「AI」の活用となっています。下の図のように、レンズと通してイメージセンサが受け取った光はそのままISP(Image Signal Processor)へ流れその後のその画像を用いて、「AI」がカメラに映ったものを認識します。その結果を車両を制御するシステムに渡し、上に挙げたように、ブレーキをかけたり、ハンドルを操作する、といった制御が行われます。
それでは、走行時にカメラは何を認識できれば、これらの機能が実現できるのでしょうか?その機能を列挙していきたいと思います。
- 物体の認識
- 一番と言っても過言でもない、重要な認識機能であり、車の前に出てくる、人や物を認識する機能です。単純に止まっている人や物だけでなく、突然前に現れる人や自転車にも対応する必要があるのと、夜間や悪天候時にも対応しなければいけません。つまり、遠くの物まで認識でき、横から出てくる人、自転車、車を認識でき、夜間暗い環境でも認識可能なカメラ。が必要になります。専門的ないい方をすると、次のようになります。
- 遠くまで認識可能:高解像度(カメラのピクセル数が多い方が良い)
- 横から出てくる物が認識可能:広角(カメラのFOVが広い方が良い)
- 夜間暗い環境でも認識可能:高感度(レンズが多くの光を取り入れる事が出来、微小な光を使って綺麗な映像が出せるイメージャが良い)
- 一番と言っても過言でもない、重要な認識機能であり、車の前に出てくる、人や物を認識する機能です。単純に止まっている人や物だけでなく、突然前に現れる人や自転車にも対応する必要があるのと、夜間や悪天候時にも対応しなければいけません。つまり、遠くの物まで認識でき、横から出てくる人、自転車、車を認識でき、夜間暗い環境でも認識可能なカメラ。が必要になります。専門的ないい方をすると、次のようになります。
- 白線の認識
- レーン逸脱をしない為に、こちらも非常に重要な機能となります。特に高速道路を運転中の場合、レーンが速い速度で、右へ曲がったり、左へ曲がったり、また、白線が古く薄くなっていたり、途切れていたり。という言った環境が予想されます。つまりこの機能に必要なカメラは、物体認識同様、まず遠くまで認識でき、次に薄い白線でも認識できる。高コントラストのカメラ。が必要になります。
- 遠くまで認識可能:高解像度(カメラのピクセル数が多い方が良い)
- 薄い白線も認識可能:高コントラスト(リニアリティ特性の良いカメラ)
- レーン逸脱をしない為に、こちらも非常に重要な機能となります。特に高速道路を運転中の場合、レーンが速い速度で、右へ曲がったり、左へ曲がったり、また、白線が古く薄くなっていたり、途切れていたり。という言った環境が予想されます。つまりこの機能に必要なカメラは、物体認識同様、まず遠くまで認識でき、次に薄い白線でも認識できる。高コントラストのカメラ。が必要になります。
- 標識や信号の認識
- 自動運転時、信号や、標識を人の代わりにカメラで見ないといけません。しかしながら信号や標識は、非常に高い場所、道が広い時には、車両からかなり遠い箇所に取り付けられている場合もあります。また、夜間においても、遠くから標識を識別する機能が要求されます。つまり、標識や信号を認識する為には、高く、遠い位置に取り付けられている標識、信号を、暗い環境でも認識でき、信号の色が識別可能なカメラが必要となります。
- 遠くまで認識可能:高解像度(カメラのピクセル数が多い方が良い)
- 高い位置、遠い位置の標識が認識可能:広角(カメラのFOVが広い方が良い)
- 夜間暗い環境でも認識可能:高感度(レンズが多くの光を取り入れる事が出来、微小な光を使って綺麗な映像が出せるイメージャが良い)
- カラーカメラ(少なくともRGBの3原色が識別可能なカメラ)
- 自動運転時、信号や、標識を人の代わりにカメラで見ないといけません。しかしながら信号や標識は、非常に高い場所、道が広い時には、車両からかなり遠い箇所に取り付けられている場合もあります。また、夜間においても、遠くから標識を識別する機能が要求されます。つまり、標識や信号を認識する為には、高く、遠い位置に取り付けられている標識、信号を、暗い環境でも認識でき、信号の色が識別可能なカメラが必要となります。
- 車両後部の認識
- 世の中にはいろいろな道があります。自動追尾機能を動作中、前の車がその道にそって走行されたときに、見失わない機能が必要です。また、トンネルの中から先行車をとらえたり、その逆も必要。先行車が曲がっても見逃さない為には、広い画角、下の図のような状況でも、車を認識する為には、明るいトンネルの先と、暗い車の双方をしっかり撮像できる、ダイナミックレンジの広いカメラが必要となります。
- 先行車が左右に曲がっても識別可能:広角(カメラのFOVが広い方が良い)
- 明暗差が大きい環境においても先行車が正しく認識可能:高ダイナミックレンジ(明るい部分と暗い部分が同時に見る事が出来るカメラ)
- 世の中にはいろいろな道があります。自動追尾機能を動作中、前の車がその道にそって走行されたときに、見失わない機能が必要です。また、トンネルの中から先行車をとらえたり、その逆も必要。先行車が曲がっても見逃さない為には、広い画角、下の図のような状況でも、車を認識する為には、明るいトンネルの先と、暗い車の双方をしっかり撮像できる、ダイナミックレンジの広いカメラが必要となります。

✓まとめ
まとめとして、自動運転をする為に必要なカメラの機能は下記となります。
- 遠くまで認識可能:高解像度
- 横から出てくる物、高い位置、遠い位置の標識、くねくね曲がる先行車が識別可能:広角
- 夜間暗い環境でも認識可能:高感度
- 薄い白線も認識可能:高コントラスト
- 明暗差が大きい環境においても先行車が正しく認識可能:高ダイナミックレンジ
- カラーカメラ
これらの機能をもったカメラをつかって実現可能な自動運転機能は下記となります。
- 衝突被害軽減ブレーキ
- 前車自動追従
- レーンキープアシスト
- 分岐、レーンチェンジ、追い越しアシスト
- 駐車支援
- ハイビーム自動制御
- 先行者発進告知
ありがとうございました。
記事が気に入って頂けたら、クリックして頂けると嬉しいです。


コメント